선형 대수는 수학 공부의 출발점
수학이야기 2020. 11. 16. 11:19수학 교육을 전공하고 수학 교사로 일하고 있다. 수학을 모르지는 않지만 그렇다고 수학을 제대로 전공하지는 않았으니 모르는 것이 아주 많다. 대학 시절 열심히 공부를 안 해서 그런가 자꾸 대학 과정을 공부하고 싶어 진다. 사실 고등학교 수학을 가르치는데 대단한 전공 지식이 필요하지는 않지만, 블로그에 대학 과목을 자주 언급하는 까닭이다.
이 글은 선형 대수를 정리하려고 쓴다. 부족한 부분이 많아도 그냥 교양서적 읽듯이 읽어 주면 좋겠다. 수학을 전공하고 싶은 고등학생에게 대충 이런 걸 배운다는 걸 알려주기 위한 글쯤으로 생각해 주면 좋을 듯하다. 주로 위키백과를 참고하였다.
차례
선형은 무엇인가?
선형대수
벡터 공간
선형 방정식을 행렬로 나타내기
선형 사상
고윳값과 고유 벡터
행렬을 대각 행렬로 만들기
수학을 전공한다면 가장 먼저 선형대수를 만난다. 선형(Linear) $+$ 대수(Algebra)이다. 모든 학문이 그러하듯 수학도 먼저 용어를 제대로 정리하고 시작해야 한다. 도형을 다루는 분야를 기하로 부르듯 주로 방정식을 푸는 영역을 대수로 부른다. 중고등학교 시절 지겹게 만난 방정식들이 이루는 구조를 파헤치는 분야라고 볼 수 있다.
대수학(Algebra)은 '흩어진 조각들을 모아 재조합한다'는 뜻을 가진 아라비아어 الجبر al-jabr가 말뿌리다. 정수론 , 기하학, 해석학과 같이 수학의 한 갈래다. 주로 수학적 기호를 조작하는 방법을 연구하는데 수학에서 쓰는 거의 모든 것을 통합하는 분야라서 수학을 시작할 때 반드시 거쳐야 하는 과정이다. 위에 말한 대로 기초적인 방정식을 풀이는 물론 추상적인 구조인 군, 환, 체를 다룬다. 특히, 선형대수는 수학뿐만 아니라 과학, 공학, 기계, 경제학을 공부하는 기초를 마련하는데 필수인 과목이다.
선형(Linear)은 무엇인가?
수학과 학생끼리 당구를 칠 때 공이 일자로 서면 '리니어'라고 우스개 소리를 한다. 뭔가 직선과 관련 있는 말이다. 간단하게 말하면 함수가 직선과 같은 성질을 가지고 있다면 선형 함수라고 한다. 두 변수가 '비례한다'와 비슷한 뜻이다.
함수 $f$가 아래 두 가지를 만족한다면 '선형 사상' 또는 '선형 함수'라고 부른다.
$f(x+y)=f(x)+f(y)$
$f(k x)=kf(x)$
그래프가 원점을 지나는 직선 $y=mx$인 함수가 바로 선형 함수이다. 대수학 책에선 함수(function)보다 일반화한 표현으로 사상(mapping)을 더 많이 쓰는 듯하다. 고등학교에서도 여러 차례 등장하는 이 성질을 만족하는 것들이 여럿이다. 합의 기호 $\sum$ 도 이 성질을 만족한다.
$$\sum(a_n +k b_n)=\sum a_n +k \sum b_n$$
위에서 $x,y$가 실수일 필요는 없다. 선형 대수에서는 주로 벡터가 된다. 선형 대수는 연립방정식을 푸는 방법에서 시작되었다. 지금은 가우스 소거법으로 일컫는 방법이 중국 수학책 구장산술의 8장에 있다.
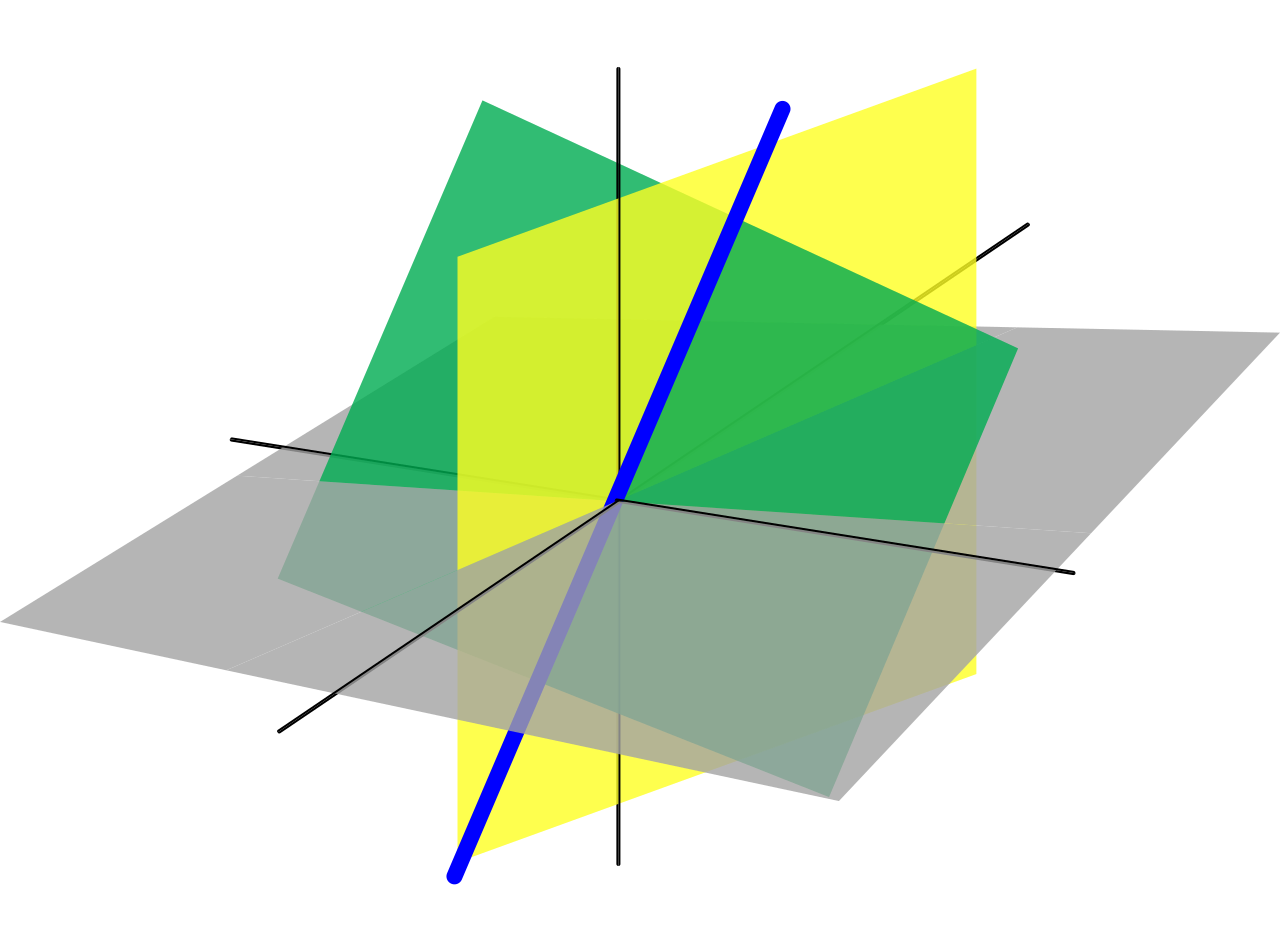
3차원 유클리드 공간에서 세 평면은 선형 방정식으로 표현되고 교점은 방정식의 공통해가 된다. 두 평면의 교선인 파란 직선은 노랑과 녹색 평면을 나타내는 두 방정식의 공통 해이다.
선형 대수
데카르트가 좌표를 도입한 이래 기하는 방정식으로 표현할 수 있게 되었다. 이 새로운 해석 기하는 선형 방정식으로 표현되게 된다.
$$a_1 x_1 +a_2 x_2+\cdots+ a_{n-1}x_{n-1}+a_n x_n =b$$
이 선형 방정식은 아래와 같은 선형 사상으로 표현되는데 이것을 행렬을 써서 해결하는 것이 바로 선형 대수다.
$$f: (x_1 ,x_2 , \cdots , x_{n-1},x_n ) \rightarrow a_1 x_1 +a_2 x_2+\cdots+ a_{n-1}x_{n-1}+a_n x_n$$
지금은 고등학교 교육과정에서 빠졌지만 연립방정식은 아래와 같이 행렬로 표현할 수 있다.
$$\begin{matrix} ax+by=1 \\ cx+dy=2 \end{matrix} \Rightarrow \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y\end{pmatrix}= \begin{pmatrix} 1 \\ 2 \end{pmatrix}$$
옛날에 고등학생도 닮음 변환, 대칭 변환, 회전 변환을 배우던 시절이 있었다. 아, 옛날이여? 과연 좋았던 걸까?
이때, 실수 순서쌍을 벡터로 부른다. 벡터 공간은 아래와 같은 공리를 가진다.
벡터 공간
어떤 체 $F$ 위에 집합 $V$가 아래 8가지 공리를 만족하면 벡터 공간이라고 한다. $F$의 원소는 스칼라(scalar) $V$의 원소는 벡터(vector)로 부른다.
$\forall \mathbf{u,v,w} \in V, \;\;a,b \in F$에 대하여 $\mathbf{u+v} \in V,\;\; a\mathbf{v} \in V$이고
- $\mathbf{u+(v+w)=(u+v)+w}$
- $\mathbf{u+v=v+u}$
- $ \forall \mathbf{v} \in V$에 대하여 $\mathbf{v+0=v}$인 $\exists \mathbf{0}\in V$ $\mathbf{0}$ :영벡터(zero vector)
- $\forall \mathbf{v} \in V$에 대하여 $\mathbf{v+(-v)=0}$인 $\exists \mathbf{-v}\in V $ 덧셈에 대한 역벡터
- $(ab)\mathbf{v}=a(b\mathbf{v})$
- $\forall \mathbf{v}\in V$에 대하여 $1\mathbf{v}=\mathbf{v}$인 $\exists 1 \in F$
- $a\mathbf{(u+v)}=a\mathbf{u}+a\mathbf{v}$
- $(a+b)\mathbf{v}=a\mathbf{v}+b\mathbf{v}$
유클리드 좌표 공간, 복소수, 일차방정식, 행렬 따위가 대표적인 벡터 공간이다.
- 정의 1
-
$V$는 $K$ 위의 벡터 공간일 때, $\forall \mathbf{v}\in V$를 $\mathbf{u}_i \in V(i=1,2,\cdots,n)$가 일차결합(linear combination)으로 나타낼 수 있다면 $\mathbf{u}_i \in V(i=1,2,\cdots,n)$가 $V$를 생성(span)한다 또는 생성 집합이라고 한다.
즉 $\forall \mathbf{v}\in V$에 대하여 $\mathbf{v}=a_1\mathbf{v}_1 +a_2\mathbf{v}_2 +\cdots+a_n\mathbf{v}_n$인 $ \exists a_i \in K$
- 정의 2
-
벡터 공간 $V$의 부분집합 $W$가 다시 벡터 공간이 되면 부분 공간이라고 부른다.
- 정의 3
-
$\mathbf{v}_1, \mathbf{v}_2,\cdots,\mathbf{v}_m \in V$에 대하여 $a_1\mathbf{v}_1 +a_2\mathbf{v}_2 +\cdots+a_m\mathbf{v}_m=\mathbf{0}$를 만족하는 적어도 하나는 $0$ 이 아닌 $a_1, a_2,\cdots,a_m \in K$가 존재하면 선형 종속(linearly dependent)이라고 하고 그렇지 않으면 선형 독립(linearly independent)이라고 한다.
$\mathbf{v}_1, \mathbf{v}_2,\cdots,\mathbf{v}_m \in V$가 독립이고 $a_1\mathbf{v}_1 +a_2\mathbf{v}_2 +\cdots+a_m\mathbf{v}_m=\mathbf{0} \implies \forall i (i=1,2,\cdots ,m),\;\; a_i =0$
- 정의 4
-
$V$의 부분집합 $S=\{ \mathbf{u}_1, \mathbf{u}_2, \cdots \mathbf{u}_n \}$가 독립이고 $V$를 생성하면 $V$의 기저(basis)라고 부른다. 벡터 공간의 차원은 기저 집합의 원소 개수다. $dim V = n(S)$이다.
벡터를 처음 시작할 때 우리가 쉽게 이해할 수 있는 화살표로 다룬다. 유클리드 평면이나 공간에 있는 벡터를 살펴보면서 벡터를 공부하자. 먼저 크기와 방향을 한꺼번에 나타내야 한다.

그림과 같이 점 $A$를 시작점 $B$를 끝점으로 하는 화살표를 벡터 $AB$로 부르고 기호로 $\overrightarrow{AB}$로 쓰기로 하자. 화살 방향을 벡터 방향으로 생각하고 화살표 길이를 벡터의 크기로 한다.
벡터 크기는 $|\overrightarrow{AB}|$로 쓴다. 시작과 끝점이 같은 벡터는 영 벡터($\overrightarrow {AA}=\overrightarrow {0}$)이고 크기는 $0$이다.
시작과 끝을 나타낼 필요가 없을 때에는 $\vec{v}$나 위에 화살표를 쓰지 않을 때에는 스칼라($a,b,c,\cdots$)와 구별하기 위해 벡터는 두꺼운 글꼴($\mathbf{u,v,w,\cdots})$로 적는다.
벡터의 덧셈과 실수 배
정의 크기와 방향이 같은 벡터는 같은 벡터이다.
덧셈과 스칼라 배(scalar multiple)는 그림과 같이 정의한다.
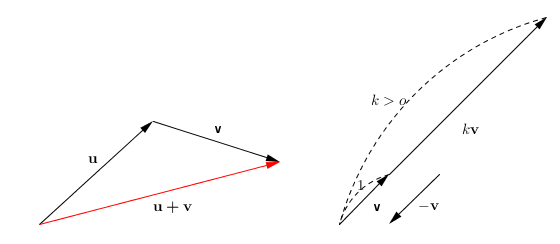
$k\mathbf{v}$는 $k>0$일 때는 $\mathbf{v}$와 같은 방향 $k<0$는 반대방향이고 크기는 $|k||\mathbf{v}|$인 벡터이다. $k=0\implies k\mathbf{v=0}$에서 마지막 $0$은 영 벡터이다. 크기가 $1$인 벡터는 단위 벡터로 부른다.
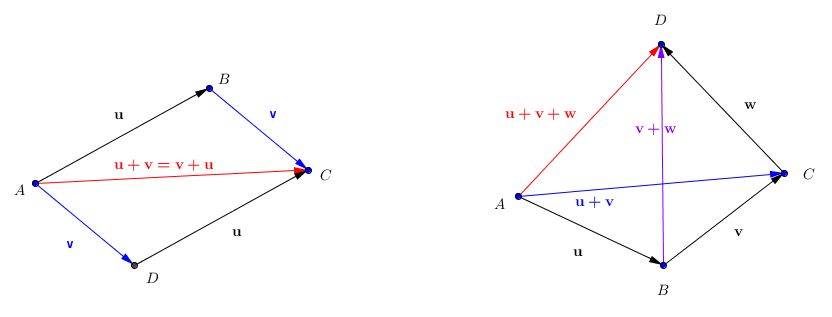
먼저, 정의된 벡터의 덧셈이 공리를 만족하는가 확인하자.
$$\mathbf{u}+\mathbf{v}=\mathbf{v}+\mathbf{u}$$
$$(\mathbf{u}+\mathbf{v})+\mathbf{w}=\mathbf{v}+(\mathbf{u}+\mathbf{w})$$
유클리드 벡터 공간은 아래와 같이 적을 수 있다.
$$\mathbb{R}^{n} = \{(x_1, x_2,\cdots,x_n)|x_i \in \mathbb{R} ,\quad n\in \mathbb{N} \}$$
$n=2$일 때는 평면벡터, $n=3$일 때는 공간 벡터이다. 평면 좌표, 공간 좌표와 다르지 않음을 알 수 있다.
정의대로 크기와 방향이 모두 같은 벡터는 서로 같은 벡터이다.
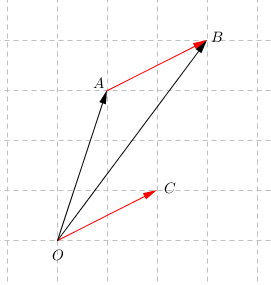
그림에서 $\overrightarrow{AB}=\overrightarrow{OC}$이다.
한편, $\overrightarrow{AB}=\overrightarrow{AO}+\overrightarrow{OB}=-\overrightarrow{OA}+\overrightarrow{OB}$이다.
따라서 평면 위에 모든 벡터는 적당한 점 $O$를 시작점으로 하는 벡터로 표현할 수 있다. 원점을 시작점으로 하는 벡터를 위치 벡터(position vector)라고 한다. 위치 벡터는 굳이 시작점을 쓸 필요가 없으므로 끝점만으로 벡터를 나타낼 수 있다.
$$\overrightarrow{AB}=-\overrightarrow{A}+\overrightarrow{B}$$
정의 영 벡터가 아닌 두 벡터 $\mathbf{u,v}$가 방향이 같거나 반대일 때, 두 벡터는 평행하다고 하고 기호로 $\mathbf{u//v}$로 적는다.
벡터의 성분 표시
벡터의 기저는 모든 벡터를 생성한다. 다시 말하면 모든 벡터는 벡터 공간의 기저(basis) 벡터의 일차 결합으로 나타낼 수 있다. *기저는 언젠가 다시 따로 정리하기로 하자.
예를 들어 2차원 평면벡터에서 $(1,0),(0,1)$을 끝점으로 하는 위치 벡터를 각각 $\mathbf{e_1, e_2}$라고 하면 $\{\mathbf{e_1 , e_2} \}$는 바탕이 된다. 이때 임의의 벡터는 모두 이 두 벡터의 일차 결합으로 나타낼 수 있다.
$\mathbf{a}=a_1 \mathbf{e_1} +a_2 \mathbf{e_2}$일 때, $\mathbf{a}$는 $(a_1, a_2)$로 쓰고 이를 성분 표시라고 한다.
벡터를 성분으로 표시하면 다루기 매우 쉽기에 수학에서는 화살표가 아닌 성분으로 다룬다.
예를 들면, 벡터 덧셈은 $\mathbf{a+b}=(a_1,a_2)+(b_1,b_2)=(a_1 +b_1 ,a_2 +b_2 )$이고 실수 배는 $k\mathbf{a}=k(a_1,a_2)=(ka_1 ,ka_2 )$이다.
선형 방정식을 행렬로 표현하기
미지수가 유한 개인 집합 안에 선형 방정식 집합을 '선형 시스템'이라고 하자. 보기를 들면 미지수가 $ x_1, x_2, . . . , x_n$ 또는 $ x, y, . . . , z $일 때 이 미지수의 일차 결합으로 이루어진 방정식은 선형 시스템을 만든다.
이 시스템이 선형 대수의 바탕이 된다. 역사적으로 선형 시스템의 해를 구하는 과정에서 선형 대수와 행렬론이 발전했다. 이제 선형 시스템을 행렬로 표현해 보자.
$$\begin{alignat}{7} 2x &&\; + \;&& y &&\; - \;&& z &&\; = \;&& 8 \\ -3x &&\; - \;&& y &&\; + \;&& 2z &&\; = \;&& -11 \\ -2x &&\; + \;&& y &&\; +\;&& 2z &&\; = \;&& -3 \end{alignat}\qquad$$
계수 행렬을
$$M = \left[\begin{array}{rrr} 2 & 1 & -1\\ -3 & -1 & 2 \\ -2 & 1 & 2 \end{array}\right]\text{.} $$
우변의 상수를 나타내는 행렬을
$$v=\begin{bmatrix} 8\\-11\\-3 \end{bmatrix}\text{.} $$
해를 나타내는 행렬을
$$X=\begin{bmatrix} x\\y\\z \end{bmatrix}\text{.} $$
이제 위에 있는 연립방정식을 아래와 같이 표현할 수 있다.
$$T(X)=v$$
아래와 같은 연립방정식이면 해를 바로 구할 수 있다.
$$\begin{alignat}{7} 2x &&\; + \;&& y &&\; - \;&& z &&\; = \;&& 0 \\ -3x &&\; - \;&& y &&\; + \;&& 2z &&\; = \;&& 0 \\ -2x &&\; + \;&& y &&\; +\;&& 2z &&\; = \;&& 0 \end{alignat}\qquad$$
가우스 소거법은 아래 행렬을 $0$을 많이 만들어서 사다리꼴(echelon form)로 만드는 과정이다.
$$M\left[\begin{array}{rrr|r} 2 & 1 & -1&8\\ -3 & -1 & 2&-11 \\ -2 & 1 & 2&-3 \end{array}\right]$$
행에 적당한 상수를 곱하고 더해서 아래와 같은 꼴을 만든다면 해를 구한 것이다.
$$M\left[\begin{array}{rrr|r} 1 & 0 & 0&2\\ 0 & 1 & 0&3 \\ 0 & 0 & 1&-1 \end{array}\right]$$
해는 아래와 같다.
$$\begin{align}x&=2\\y&=3\\z&=-1.\end{align}$$
결국 역행렬을 구하는 과정이다. 더 자세하게 알고 싶다면 아래에서 확인해 보자.
가우스 소거법(Gaussian elimination)
미지수가 같은 1차 연립방정식은 하나의 체계를 이룬다. 1차 연립방정식이 이루고 있는 체계를 연구하는 것이 선형대수(Linear Algebra)다. 먼저 연립방정식을 쉽게 풀어보자. \begin{alignat}{7} x &&\; + \;
suhak.tistory.com
선형 사상
두 벡터 공간 $V, W$ 사이의 사상 $T: V\rightarrow W$가 아래를 만족하여 덧셈과 스칼라곱을 보존하면 $T$는 선형 사상이다.
$$T(\mathbf{u+v})=T(\mathbf{u})+T(\mathbf{v}),\quad T(a\mathbf{v})=aT(\mathbf{v})\quad (\mathbf{u,v}\in V, \;\;a\in F)$$
이때, $V=W$라면 $T$를 선형 변환(linear transformation) 또는 선형 연산자(linear operator)로 부른다. 위에서 말한 대로 선형 사상을 표현하는 가장 좋은 방법은 행렬이다. 따라서 선형 대수는 행렬을 연구하는 것이다. 선형 대수 책은 지루한 계산으로 시작한다. 그러다가 갑자기 선형 사상이 툭 튀어나오면서 확 어려워진다.
$V$는 $n$차원일 때 선형 사상 $T: V\rightarrow V$는 $V$의 임의의 기저에 대하여 선형 방정식으로 나타낼 수 있다.
벡터 공간 $V$가 $n$차원으로 $\{\mathbf{e_i}\}$가 기저라고 하자. 기본 단위 벡터인 기저라고 생각하면 편하다.
$\mathbf{v}=(v_1 ,v_2, \cdots,v_n)$이면
$$\mathbf{v}=v_1\mathbf{e_1}+v_2 \mathbf{e_2}+ \cdots + v_n\mathbf{e_n}$$
이다.
$$T(\mathbf{v})=T(v_1\mathbf{e_1}+v_2 \mathbf{e_2}+ \cdots + v_n\mathbf{e_n})=v_1T(\mathbf{e_1})+v_2 T(\mathbf{e_2})+ \cdots + v_nT(\mathbf{e_n})$$
이때 아래와 같다고 하면
$$\begin{split}T(\mathbf{e_1})&=a_{11}\mathbf{e_1} +a_{12} \mathbf{e_2} +\cdots + a_{1n}\mathbf{e_n} \\ T(\mathbf{e_2})&=a_{21}\mathbf{e_1} +a_{22} \mathbf{e_2} +\cdots + a_{2n}\mathbf{e_n}\\ &\vdots \\ T(\mathbf{e_n})&=a_{n1}\mathbf{e_1} +a_{n2} \mathbf{e_2} +\cdots + a_{nn}\mathbf{e_n}\end{split}\tag{1}$$
이것을 행렬로 표현하면 아래와 같다.
$$T(v)=[\mathbf{e_1},\mathbf{e_2}\cdots,\mathbf{e_n}]\begin{bmatrix} a_{11} & a_{21} & \cdots & a_{n1} \\ a_{12} & a_{22} & \cdots & a_{n2} \\ \cdots & \cdots & \cdots & \cdots \\ a_{1n }& a_{2n} & \cdots & a_{nn} \end{bmatrix}\begin{bmatrix}v_1 \\ v_2\\ \vdots \\ v_n\end{bmatrix}$$
이때 (1)의 계수 행렬의 전치행렬(행과 열을 바꾼 행렬)을 기저 $\{\mathbf{e_i}\}$에 대한 선형 변환 $T: V\rightarrow V$을 나타내는 행렬이라 하고 $[T]_e$나 $[T]$로 적는다.
$$[T]_e=\begin{bmatrix} a_{11} & a_{21} & \cdots & a_{n1} \\ a_{12} & a_{22} & \cdots & a_{n2} \\ \cdots & \cdots & \cdots & \cdots \\ a_{1n }& a_{2n} & \cdots & a_{nn} \end{bmatrix}$$
이 행렬이 선형 변환을 파악하는데 아주 중요한 역할을 하므로 이제 이 행렬을 어떻게 다룰 것인가를 연구하면 된다.
수학에서 모든 연산이 그렇듯이 행렬의 연산인 곱셈도 항등원과 역원을 따져야 한다.
- 모든 $n$차 행렬 $A$에 대하여 $AX=XA=A$인 행렬 $X$를 항등 행렬 $I$로 쓴다.
- $AX=XA=I$인 행렬 $X$가 존재하면 $A$는 가역(invertible) 행렬이고 $X=A^{-1}$로 쓴다.
선형 변환을 나타내는 행렬 $[T]_e$의 역행렬을 구하면 모든 것이 끝난다. $2, 3$차 행렬은 가우스 소거법으로 간단하게 해결할 수 있지만 임의의 $n$차 행렬의 역행렬을 구하는 일은 매우 어려운 일이다. 방정식 $n$개가 연립되었을 때 해를 구하는 알고리즘은 간단하지만 시간과 노력이 없으면 해결이 쉽지 않다.
$n$차 행렬의 역행렬을 구하는 과정에 중요한 역할을 하는 값이 바로 고윳값이다.
고윳값과 고유 벡터(Eigenvalues and eigenvectors)
적당한 가역 행렬 $P$가 있어서 $AP=PB$를 만족하면 두 행렬 $A,B$는 서로 닮음이다. 다시 적으면 아래와 같다.
$$P^{-1}AP=B$$
$B$가 대각선에 있는 성분을 제외한 모든 성분이 0이면 행렬 $A$를 대각화했다고 이른다. 대각화한 행렬 $B$는 거듭제곱이 아주 쉽다. 옛날엔 고등학교 과정에도 자주 출제되기도 했었다.
$$(P^{-1}AP)(P^{-1}AP)\cdots (P^{-1}AP)=B^{n}$$
$$P^{-1}A^{n}P=B^{n}$$
$$A^{n}=PB^{n}P^{-1}$$
벡터 공간 $V$ 위에서의 선형 변환 $T$가 $v \in V$에 대하여 아래를 만족하면 실수 $\lambda$가 존재하면 $v$를 고유 벡터(eugenvectors)라 하고 실수 $\lambda$를 고윳값(eigenvalues)이라고 한다.
$$T(v)=\lambda v$$
기하적으로 해석하면 고유 벡터는 선형 변환에 의해 평행인 벡터로 변환된다. 변환해도 방향이 같거나 반대인 벡터가 된다는 뜻이다. 아래 그림을 보면 파란과 분홍 벡터는 변환해도 방향이 바뀌지 않음을 알 수 있다.
연습문제
선형 변환 $T: R^2 \rightarrow R^2$가 아래와 같이 주어졌다고 하자.
$$T(\mathbf{v})=\begin{bmatrix}2&1\\1&2\end{bmatrix}\mathbf{v}$$
이제 고윳값과 고유 벡터를 찾아보자.
$$A=\begin{bmatrix}2&1\\1&2\end{bmatrix}$$라고 하자.
$$T(\mathbf{v})=\lambda \mathbf{v}$$이므로
$$\begin{bmatrix}2&1\\1&2\end{bmatrix}\mathbf{v}=\lambda I \mathbf{v}$$
$$\begin{bmatrix}2-\lambda &1\\1&2-\lambda \end{bmatrix}\mathbf{v}=\mathbf{O}$$
$\mathbf{v}\not=\mathbf{O}$이다.
따라서 $\bigg|\begin{matrix}2-\lambda &1\\1&2-\lambda \end{matrix}\bigg|=0$이다.
$$(2-\lambda)^2 -1=0$$
$$\lambda^2 -4\lambda+3=0\tag{2}$$
고윳값은 $\lambda_1=1,\quad \lambda_2=3$이다. 고윳값을 해로 가지는 방정식 (2)를 특성 방정식이라 한다.
$\lambda=1$일 때 고유 벡터는
$$\begin{bmatrix}1 &1\\1&1 \end{bmatrix}\mathbf{v_{\lambda=1}}=\mathbf{O}$$
를 만족한다. $\mathbf{v_{\lambda=1}}=\begin{pmatrix}x\\y\end{pmatrix}$라고 하면 $x+y=0$에서 $\mathbf{v_{\lambda=1}}=\begin{bmatrix}1\\-1\end{bmatrix}$이다.
$\lambda=3$일 때 고유 벡터는 마찬가지로 계산하면
$$\begin{bmatrix}-1 &1\\1&-1 \end{bmatrix}\mathbf{v_{\lambda=3}}=\mathbf{O}$$
에서 $\mathbf{v_{\lambda=3}}=\begin{bmatrix}1\\1\end{bmatrix}$이다.
두 벡터 $\mathbf{v_{\lambda=1}},\mathbf{v_{\lambda=3}}$를 열 벡터로 하는 행렬 $P$를 생각하자.
$$P=\begin{bmatrix}1 &1\\-1&1 \end{bmatrix}$$
$$P^{-1} A P= \begin{bmatrix}1&0\\0&1\end{bmatrix}$$이므로 $A$와 닮은 대각화된 행렬을 얻는다.
행렬을 대각 행렬로 만들기
이제 마지막으로 일반화를 해보자.
$n$차원 벡터 공간 $v$에서 선형 변환 $T:V\rightarrow V$는 $T(\mathbf{v}_i)=A \mathbf{v}_i$로 주어졌다고 하자.
$n$차 행렬 $A$가 $n$개의 고윳값 $\lambda_1 ,\lambda_2 , \cdots , \lambda_n$을 가진다고 하자.
$\lambda_i$에 대한 고유 벡터를 $\mathbf{x}_i$라고 하자.
$$T(\mathbf{x}_i)=A \mathbf{x}_i=\lambda \mathbf{x}_i$$
위에서와 마찬가지로 고유 벡터를 열 벡터로 하는 행렬을 생각하자.
$$P=[\mathbf{x}_1 \quad \mathbf{x}_2 \quad \cdots \quad \mathbf{x}_n]$$
$$\begin{split}AP&=A[\mathbf{x}_1 \quad \mathbf{x}_2 \quad \cdots \quad \mathbf{x}_n]\\&=[A\mathbf{x}_1 \quad A\mathbf{x}_2 \quad \cdots \quad A\mathbf{x}_n]\\&=[\lambda_1\mathbf{x}_1 \quad \lambda_2\mathbf{x}_2 \quad \cdots \quad \lambda_n\mathbf{x}_n]\\&=[\mathbf{x}_1 \quad \mathbf{x}_2 \quad \cdots \quad \mathbf{x}_n] \begin{bmatrix} \lambda_1 &0&\cdots &0\\ 0&\lambda_2&\cdots &0\\0&0&\cdots&0\\0&0&\cdots&\lambda_n \end{bmatrix}\\&=P \begin{bmatrix} \lambda_1 &0&\cdots &0\\ 0&\lambda_2&\cdots &0\\0&0&\cdots&0\\0&0&\cdots&\lambda_n \end{bmatrix}\end{split}$$
결론을 정리해 보자.
$$P^{-1}AP= \begin{bmatrix} \lambda_1 &0&\cdots &0\\ 0&\lambda_2&\cdots &0\\0&0&\cdots&0\\0&0&\cdots&\lambda_n \end{bmatrix}$$
닮음인 대각 행렬을 만드는 일에 성공하였다. 이제 선형 변환 $T$를 합성하는 일 즉 $A^n$을 구하는 일은 대각 행렬인 $P^{-1}AP$의 거듭제곱을 구하면 되는 일이다.
$$(P^{-1}AP)^n= \begin{bmatrix} \lambda_1 &0&\cdots &0\\ 0&\lambda_2&\cdots &0\\0&0&\cdots&0\\0&0&\cdots&\lambda_n \end{bmatrix}^n=\begin{bmatrix} \lambda_1^n &0&\cdots &0\\ 0&\lambda_2^n&\cdots &0\\0&0&\cdots&0\\0&0&\cdots&\lambda_n^n \end{bmatrix}$$
이것은 식은 죽 먹기보다 조금 더 어렵다. 정리는 여기까지 읽고 흥미가 생겨서 나머지를 더 알고 싶다면 수학과를 가야 한다. 다음 단계로 추상 대수가 기다리고 있다.
추가 연습문제
부족함을 채우기 위해 연습을 조금 더 하기로 하자.
문제 하나. 아래와 같은 3차 행렬을 생각하자.
$$A = \begin{bmatrix} 2 & 0 & 0 \\ 0 & 3 & 4 \\ 0 & 4 & 9 \end{bmatrix}$$
특성 방정식은
$$\begin{align} |A-\lambda I| &= \left|\begin{bmatrix} 2 & 0 & 0 \\ 0 & 3 & 4 \\ 0 & 4 & 9 \end{bmatrix} - \lambda\begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}\right| = \begin{vmatrix} 2 - \lambda & 0 & 0 \\ 0 & 3 - \lambda & 4 \\ 0 & 4 & 9 - \lambda \end{vmatrix}\\ \\ &= (2 - \lambda)\bigl[(3 - \lambda)(9 - \lambda) - 16\bigr] = -\lambda^3 + 14\lambda^2 - 35\lambda + 22. \end{align}$$
이고 $2, 1, 11$을 해로 가진다. 세 개의 고윳값에 따라 고유 벡터도 세 개다.
$\lambda=2$일 때는
$$\begin{bmatrix} 0 & 0 & 0 \\ 0 & 1 & 4 \\ 0 & 4 & 7 \end{bmatrix}\begin{bmatrix} x \\ y \\ z \end{bmatrix}=\mathbf{O}$$
이므로 고유 벡터는 $[ 1 \quad 0 \quad 0]^{T}$이다. 나머지도 마찬가지로 구하면 아래와 같다. $[\;\;]^T$는 전치 행렬을 말한다.
$$[ 1 \quad 0 \quad 0 ]^{T}, \;\; [ 0 \quad -2 \quad 1 ]^{T}, \;\; [ 0 \quad 1 \quad 2 ]^{T}$$
문제 둘. 순환 순열을 표현하는 행렬
$$A = \begin{bmatrix} 0 & 1 & 0\\ 0 & 0 & 1\\ 1 & 0 & 0 \end{bmatrix}$$
특성 방정식은
$$\begin{align} |A-\lambda I| &= \left| \begin{bmatrix} 0 & 1 & 0\\ 0 & 0 & 1\\ 1 & 0 & 0 \end{bmatrix} - \lambda\begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}\right| = \begin{vmatrix} - \lambda & 1 & 0 \\ 0 & - \lambda & 1 \\ 1 & 0 & - \lambda \end{vmatrix}\\ \\ &= (- \lambda)( - \lambda)^2-1(-1) = 1-\lambda^3. \end{align}$$
이고 아래와 같은 세 근을 가진다.
$$\begin{align} \lambda_1 &= 1 \\ \lambda_2 &= -\frac{1}{2} + \mathbf{i}\frac{\sqrt{3}}{2} \\ \lambda_3 &= \lambda_2^* = -\frac{1}{2} - \mathbf{i}\frac{\sqrt{3}}{2} \end{align}$$
여기서 다들 알고 있듯이 $\mathbf{i}$는 허수 단위로 $\mathbf{i}^2 = -1$이다.
실수인 고윳값은 $\lambda_1 =1$이다.
$$ A\begin{bmatrix} 5\\ 5\\ 5 \end{bmatrix} = \begin{bmatrix} 5\\ 5\\ 5 \end{bmatrix} = 1 \cdot \begin{bmatrix} 5\\ 5\\ 5 \end{bmatrix}.$$
이므로 $\lambda_1 =1$에 대한 고유 벡터는 $v_{\lambda_1}=[1 \quad 1 \quad 1]^T$이다.
허수인 고윳값 $\lambda_2 , \lambda_3$은 서로 켤레 복소수이다. 이때를 위해 고등학교 때 $\omega^3 =1$인 복소수를 열심히 계산한 기억이 있을 것이다. 근과 계수와의 관계에 따라 아래가 성립한다.
$$\lambda_2\lambda_3 = 1, \quad \lambda_2^2 = \lambda_3, \quad \lambda_3^2 = \lambda_2$$
이제 고유 벡터를 찾아보자.
$$A \begin{bmatrix} 1 \\ \lambda_2 \\ \lambda_3 \end{bmatrix} = \begin{bmatrix} \lambda_2 \\ \lambda_3 \\ 1 \end{bmatrix} = \lambda_2 \cdot \begin{bmatrix} 1 \\ \lambda_2 \\ \lambda_3 \end{bmatrix}$$
마찬가지로
$$A \begin{bmatrix} 1 \\ \lambda_3 \\ \lambda_2 \end{bmatrix} = \begin{bmatrix} \lambda_3 \\ \lambda_2 \\ 1 \end{bmatrix} = \lambda_3 \cdot \begin{bmatrix} 1 \\ \lambda_3 \\ \lambda_2 \end{bmatrix}.$$
고유 벡터는 2개가 있다.
$$v_{\lambda_2} = [ 1 \quad \lambda_2 \quad \lambda_3]^{T} ,\quad v_{\lambda_3} = [ 1 \quad \lambda_3 \quad \lambda_2]^{T}.$$
두 고윳값 $\lambda_2 ,\;\;\lambda_3$과 관련된 고유 벡터도 서로 켤레가 된다.
$$v_{\lambda_2} = v_{\lambda_3}^*.$$